OpenGL矩阵转换举例分析(全局坐标系与局部坐标系的对比与联系)
OpenGL坐标转换采用的是局部坐标系,其特点有一下几点:
①每一次转换相对于自身坐标系
②转换叠加采用右乘矩阵的方式
③后调用先执行
全局坐标系与之相反,故在进行转换时所用的转换函数有所不同。
本文利用代码查看OpenGL图形转换过程中的ModelView当前矩阵,并与我们普通矩阵运算形成对比,有助于理解其原理。将长方体如图1经过系列转换变成图2。
图1

图2
1.利用OpenGL转换过程的矩阵变化过程如下,调用函数glGetFloatv(GL_MODELVIEW_MATRIX, mat1)获取当前ModelView的矩阵。

static const float vertex_list[8][3] =
{
{-0.5f, -0.5f, -0.5f},
{0.5f, -0.5f, -0.5f},
{-0.5f, 0.5f, -0.5f},
{0.5f, 0.5f, -0.5f},
{-0.5f, -0.5f, 0.5f},
{0.5f, -0.5f, 0.5f},
{-0.5f, 0.5f, 0.5f},
{0.5f, 0.5f, 0.5f}
};
// 将要使用的顶点的序号保存到一个数组里面
static const GLint index_list[12][2] =
{
{0, 1},
{2, 3},
{4, 5},
{6, 7},
{0, 2},
{1, 3},
{4, 6},
{5, 7},
{0, 4},
{1, 5},
{7, 3},
{2, 6}
};
// 绘制立方体
void DrawCube(void)
{
int i,j;
glBegin(GL_LINES);
for(i=0; i<12; ++i) // 12 条线段
{
for(j=0; j<2; ++j) // 每条线段 2个顶点
{
glVertex3fv(vertex_list[index_list[i][j]]);
}
}
glEnd();
}
void printMatrices(float mat[16]){
cout << fixed << setprecision(5);
cout << "[" << setw(10) << mat[0] << " " << setw(10) << mat[4] << " " << setw(10) << mat[8] << " " << setw(10) << mat[12] << "]" << endl;
cout << "[" << setw(10) << mat[1] << " " << setw(10) << mat[5] << " " << setw(10) << mat[9] << " " << setw(10) << mat[13] << "]" << endl;
cout << "[" << setw(10) << mat[2] << " " << setw(10) << mat[6] << " " << setw(10) << mat[10] << " " << setw(10) << mat[14] << "]" << endl;
cout << "[" << setw(10) << mat[3] << " " << setw(10) << mat[7] << " " << setw(10) << mat[11] << " " << setw(10) << mat[15] << "]" << endl;
}
const float camAngleY = 30.0, camAngleX = 60.0, camDist= 0.2;
void initGLUT(int argc, char *argv[]);
Matrix4 matModel, matModelView, matView;
void myDisplay(void)
{
glClearColor(1.00f,1.00f,1.00f,1.00f);//背景白色
glClear(GL_COLOR_BUFFER_BIT|GL_DEPTH_BUFFER_BIT);
glMatrixMode(GL_MODELVIEW);
glLoadIdentity(); //加载单位矩阵
glColor3f(0, 0, 0);
glPushMatrix();
float mat1[16],mat2[16],mat3[16],mat4[16];
glTranslatef(0, 0, camDist); // 1.
glGetFloatv(GL_MODELVIEW_MATRIX, mat1); //获取当前矩阵
glRotatef(-camAngleX, 1,0,0); // 2.
glGetFloatv(GL_MODELVIEW_MATRIX, mat2);
glRotatef(-camAngleY, 0,1,0); // 3.
glGetFloatv(GL_MODELVIEW_MATRIX, mat3);
glScalef(0.5,0.5,0.5); //4.
glGetFloatv(GL_MODELVIEW_MATRIX, mat4);
cout << "1.glTranslatef(0, 0, 0.2):" << "沿z轴平移0.2后的矩阵为:" << endl;
printMatrices(mat1);
cout << endl << "2.glTranslatef(30, 1, 0,0):" << "继续绕x轴旋转30°后的矩阵为:" << endl ;
printMatrices(mat2);
cout << endl << "3.glTranslatef(60, 0, 1, 0):" << "绕y轴旋转60°后的矩阵为:" << endl ;
printMatrices(mat3);
cout << endl << "4.glTranslatef(0.5, 0.5, 0.5):" << "整体缩小一半后的矩阵为:" << endl ;
printMatrices(mat4);
DrawCube();
glPopMatrix();
glFlush();
}
int main(int argc, char *argv[])
{
initGLUT(argc,argv);
return 0;
}
void initGLUT(int argc, char *argv[])
{
glutInit(&argc, argv);
glutInitDisplayMode(GLUT_RGB | GLUT_SINGLE);
glutInitWindowPosition(20, 50);
glutInitWindowSize(800, 500);
glutCreateWindow("矩阵转换");
glutDisplayFunc(&myDisplay);
glutMainLoop();
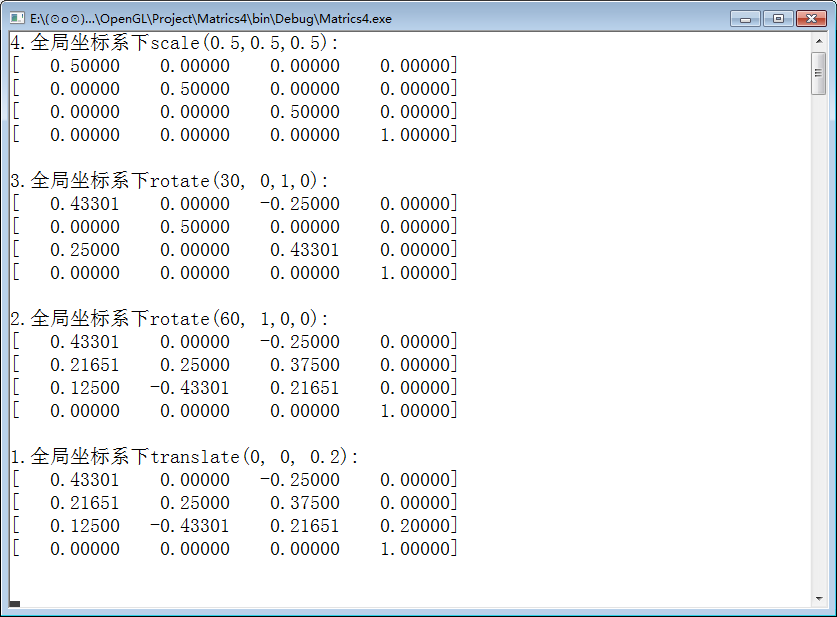
}2.利用Matrix类,在全局坐标系下,左乘,按照与OpenGL相反的顺序进行转换,可得到相同的转换矩阵,获得相同的转换结果,如下所示。
注:全局坐标系下的转换函数公式与局部坐标系不同。
较1修改的代码如下:
void myDisplay(void)
{
glClearColor(1.00f,1.00f,1.00f,1.00f);//背景白色
glClear(GL_COLOR_BUFFER_BIT|GL_DEPTH_BUFFER_BIT);
glMatrixMode(GL_MODELVIEW);
glLoadIdentity(); //加载单位矩阵
glColor3f(0, 0, 0);
glPushMatrix();
glLoadMatrixf(matView.get()); //将转换矩阵传递到OpenGL
//glLoadMatrixf(matModelView.getTranspose());
DrawCube(); //绘制长方体
glPopMatrix();
// 向OpenGL传递矩阵
//glLoadMatrixf(matView.getTranspose());
glFlush();
}
int main(int argc, char *argv[])
{
cout << "左乘,全局坐标,按照OpenGL转换时相反的顺序转换" << endl;
matView.identity(); // 转换顺序:
cout << "4.全局坐标系下scale(0.5,0.5,0.5):" << endl;
matView.scale(0.5,0.5,0.5);
cout << matView << endl;
cout << "3.全局坐标系下rotate(30, 0,1,0):" << endl;
matView.rotate(-camAngleY, 0,1,0); // 1: rotate on y-axis
cout << matView << endl;
cout << "2.全局坐标系下rotate(60, 1,0,0):" << endl;
matView.rotate(-camAngleX, 1,0,0);
cout << matView << endl;
cout << "1.全局坐标系下translate(0, 0, 0.2):" << endl;
matView.translate(0, 0, camDist);
cout << matView << endl;
initGLUT(argc,argv);
return 0;
}注:全局坐标系矩阵的运算参考文章http://www.songho.ca/opengl/gl_matrix.html#example1
使用该例子里的矩阵类,使用前需导入<Matrices.h>及<Vectors.h>,请读者自行在上述网址中下载。
智能推荐

地理坐标系与投影坐标系的区别
1.基本概念 平时开展GIS开发、研究、应用工作,总会接触到坐标系,也会遇到坐标转换的问题,如地理坐标系、投影坐标系等。 地理坐标系是球面坐标,参考平面是椭球面,坐标单位是经纬度; 投影坐标系是平面坐标系,参考平面是水平面,坐标单位...
Unity:坐标系转换
一、Unity的坐标系体系 世界坐标系 (World Space)、屏幕坐标系 (Screen Space)、视口坐标系 (Viewport Space)、GUI界面坐标系 (GUI System) 左右手定则:用手握住 z 轴,大拇指朝向 z 轴正方向,然后用手的四指从 x 轴正方向握拳头,如果是左手 90 度就能把四指握到 y 轴就是左手坐标系,如果是右手 90 度握紧后到了 y 轴就是右手坐...
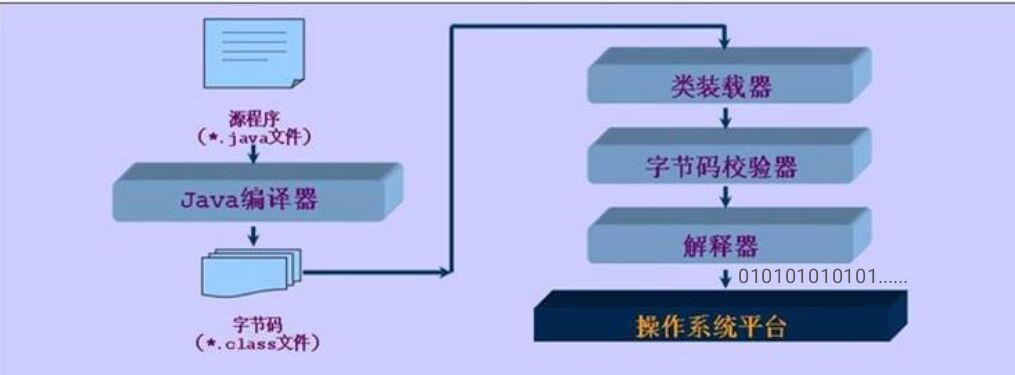
Java运行原理
1.Java运行原理 我们可通过文本编辑板生成Java源代码(.java)经过dos窗口由Java编译器(javac.exe)生成字节码文件(.class),字节码可由Java虚拟机转化为机器码供计算机读取处理。由于Java可以生成字节码可供虚拟机转译所以可跨平台运行。运行过程如下: 所以相对于C语言还需要转化为exe文件才能运行的权限,Java具有跨平台...
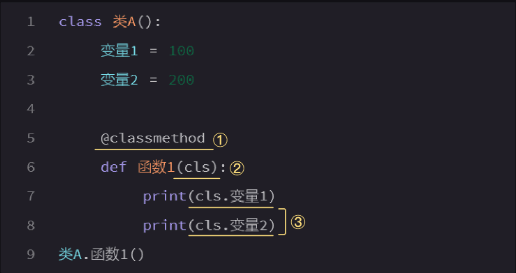
Python由放弃到入门,基础篇七(类)下
类的实例化 有感于现在python教程多如牛毛,且大多高不可攀,多次拜读而不得其门道,遂由入门到放弃。偶有机缘,得一不错教程,得以入门,现博客分享,想要获取完整教程,ff17328081445。 通过对比可以看到,实例化后再使用的格式,①是空着的,意思是这里不再需要@classmethod的声明,并且在第②处,把cls替换成了self。同时,实例化后再使用的格式,需要先赋值然后再调用(第③处): ...
pytorch CNN手写字体识别
数据整体训练一次,对于accuracy都是0的问题,由于刚开始学,有些代码的细节我也没看懂,不过整体结果是对的,可能是由于pytorch版本的更新,导致accuracy的计算方式有所改变 内容转载自:https://www.bilibili.com/video/av15997678/?p=19...
猜你喜欢
linux后台运行命令总结
linux后台运行命令总结 问题: 我们有时候需要登录远程服务器跑运行时间非常长的脚本,这个时候你要让脚本后台运行,不然占着终端窗口看着不舒服。但万一网络不好,(比如我这儿的破校园网,高峰时几秒钟断一次),终端突然和服务器之间的连接断了,那脚本就会自动停了(因为运行test.sh进程的父进程就是当前的shell终端进程,关闭当前shell终端时,父进程退出,会发送hangup信号给所有子进程,子进...
类对象模型和this指针
关于类/对象大小的计算 类只是一种类型定义,它本身是没有大小可言的。 我们这里指的类的大小,其实指的是类的对象所占的大小。因此,如果用sizeof运算符对一个类型名操作,得到的是具有该类型实体的大小。 首先,类大小的计算遵循结构体的对齐原则 类的大小与普通数据成员有关,与成员函数和静态成员无关。即普通成员函数,静态成员函数,静态数据成员,静态常量数据成员均对类的大小无影响 虚函数对类的大小有影响,...


3D人脸重建——PRNet网络输出的理解
前言 之前有款换脸软件不是叫ZAO么,分析了一下,它的实现原理绝对是3D人脸重建,而非deepfake方法,找了一篇3D重建的论文和源码看看。这里对源码中的部分函数做了自己的理解和改写。 国际惯例,参考博客: 什么是uv贴图? PRNet论文 PRNet代码 本博客主要是对PRNet的输出进行理解。 理论简介 这篇博客比较系统的介绍了3D人脸重建的方法,就我个人浅显的理解,分为两个流派:1.通过算...
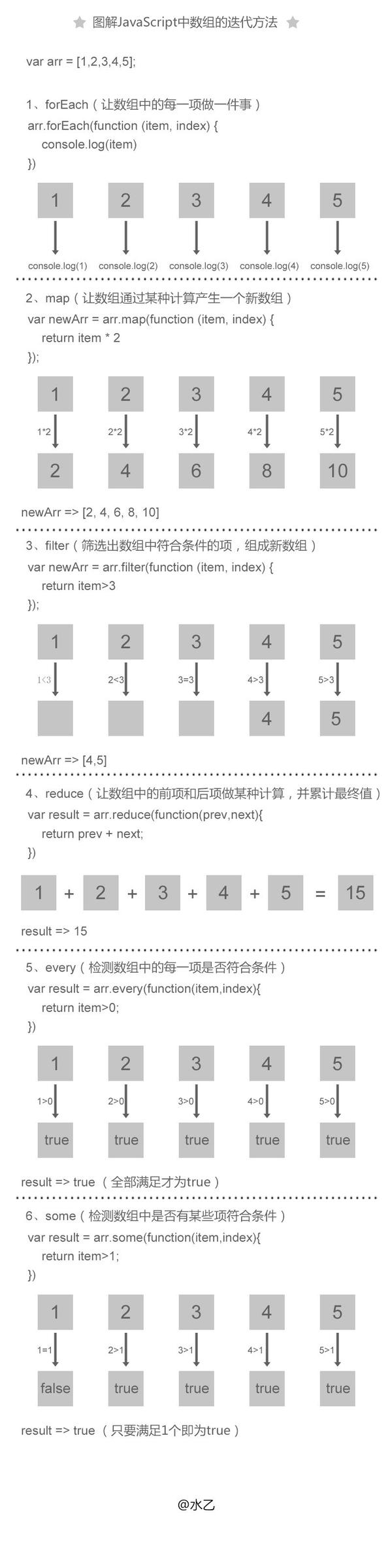
javascript简单的正则表达式入门
内容来自百度前端学院javascript入门课程 基本的HTML: 样式: javascript: document.write和innerHTML有什么区别 前者是直接将内容写入文档流,如果写入之前没有调用document.open,那么回自动调用document.open(每打开一次文档流都会清除之前的所有内容包括变量)。每次写完关闭后重新调用该函数的话,会导致页面重写。 innerHTML是...