图像的等距变换,相似变换,仿射变换,射影变换及其matlab实现
标签: matlab
source url: http://blog.csdn.net/u014096352/article/details/53526747
图像的等距变换,相似变换,仿射变换,射影变换及其matlab实现
第二次写CSDN文档,上一篇的排版实在太烂了,于是决定认真学习一下markdown的语法。
好了,废话不多说,今天,我们学习一下图像(2维平面)到图像(2维平面)的四种变换,等距变换,相似变换,仿射变换,投影变换 首先介绍它的原理,最后介绍matlab的实现
1.数学基础
射影变换矩阵
听了这么多群,不变量的数学概念,可能有点晕,下面我用最直观的语言解释。线性空间中的线性变换可以用矩阵来描述,因此我们用矩阵来刻画这四种变换。我们以数学系的经典代数入门教材北大版的《高等代数》为例,研究这些变换是如何进行的
2. 等距变换
等距变换(isometric transform),保持欧式距离不变,当图像中的点用齐次坐标表示时,变换矩阵如下所示:
当
其中
clear;close all;clc
I=imread('book1.jpg');
figure,imshow(I);
[w,h]=size(I);
theta=pi/4;
t=[100,100];
s=0.5;
% test Eucludian transform
H_e=projective2d([cos(theta) -sin(theta) t(1);
sin(theta) cos(theta) t(2);
0 0 1]');
newimg=imwarp(I,H_e);
figure,imshow(newimg);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
可以看出,等距变换就是对图像的旋转+平移
3. 相似变换
相似变换(similarity transform):等距变换+均匀缩放,当图像中的点用齐次坐标表示时,变换矩阵如下所示:
当
其中
clear;close all;clc
I=imread('book1.jpg');
figure,imshow(I);
[w,h]=size(I);
theta=pi/4;
t=[100,100];
s=0.5;
%% test similar transform
H_s=projective2d([s*cos(theta) -s*sin(theta) t(1);
s*sin(theta) s*cos(theta) t(2);
0 0 1]');
newimg=imwarp(I,H_s);
figure,imshow(newimg);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15

可以看出,等距变换就是对图像的旋转+平移+缩放,这个图相对原图是变小了一些。
4. 仿射变换
仿射变换(affine transform):非奇异变换+均匀缩放,当图像中的点用齐次坐标表示时,变换矩阵如下所示:
仿射变换可以更简单的写成
其中
仿射变换的不变量是:平行线,平行线的长度的比例,面积的比例。用matlab实现仿射变换如下:
clear;close all;clc
I=imread('book1.jpg');
figure,imshow(I);
[w,h]=size(I);
theta=pi/4;
t=[100,100];
s=0.5;
%% test affine transform
H_a=projective2d([1 0.5 t(1);
0 0.5 t(2);
0 0 1]');
newimg=imwarp(I,H_a);
figure,imshow(newimg);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
可以看出,仿射变换就是对图像的旋转+平移+缩放+切变(shear),相比前两种变换图像的形状发生了改变,但是原图中的平行线仍然保持平行。
5. 射影变换
射影变换(projection transform):当图像中的点的齐次坐标的一般非奇异线性变换。有些文献中把射影变换矩阵称为单应性矩阵变换矩阵如下所示:
仿射变换可以更简单的写成
其中
射影变换的不变量是:长度的交比。用matlab实现射影变换如下:
clear;close all;clc
I=imread('book1.jpg');
figure,imshow(I);
[w,h]=size(I);
theta=pi/4;
t=[100,100];
s=0.5;
%% test projective transform
H_P=projective2d([0.765,-0.122,-0.0002;
-0.174,0.916,9.050e-05;
105.018,123.780,1]);
newimg=imwarp(I,H_P);
figure,imshow(newimg);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
可以看出,射影变换就是对图像的旋转+平移+缩放+切变+射影,相比前三种变换图像的形变更为自由,原图中的平行线经过变换之后已经不在平行,而可能相交于一点,射影变换就是把理想点(平行直线在无穷远处相交)变换到图像上。
6 应用
说了这么多,下边举一个简单的小应用,就是把通过求两幅对应点的单应性矩阵(射影矩阵),把一种图片变换成另一张的形状。如图:
选择两幅图像对应的四个点
第一幅
第二幅

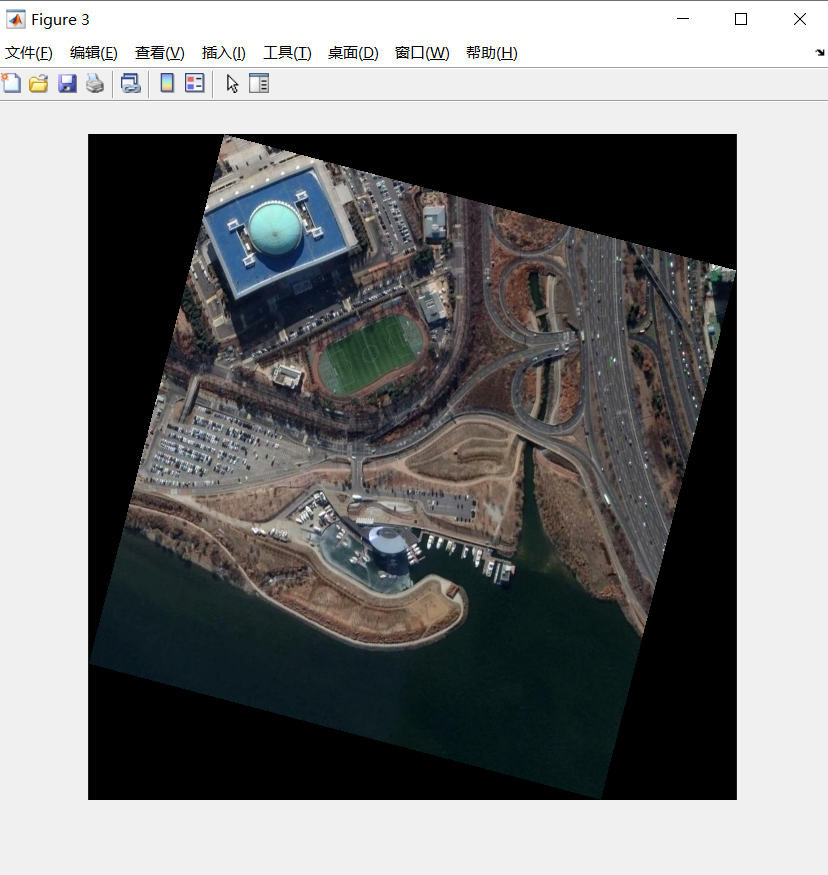
变换的结果
这样就成功把第二幅图片变成第一副图片的角度
下面附上代码
%% Initial
clear;
clc;
img_num=2; %the number of image
compress_scale=0.4; %define image compress scale
points_p=[0 0;1 0;2 1;2 0]; %define cordinate of 2D plain in 3D space
%% define a cell that load image
Image=cell(1,img_num);
%% read the image
Image{1,1}=imread('book1.jpg');
Image{1,2}=imread('book2.jpg');
%% image compression, transform rgb to gray, and select feature points
feature=[];
for i=1:img_num
Image{1,i}=imresize(Image{1,i},compress_scale);
I{:,:,i}=Image{1,i};
Image{1,i}=rgb2gray(Image{1,i});
imshow(Image{1,i});
hold on;
for j=1:4
[x,y]= ginput(1); %select the corner
x=round(x);
y=round(y);
plot(x,y,'ro');
feature(j,2*i-1)=x; %feature is a matrix containing corner cordination
feature(j,2*i)=y;
end
close all;
end
%% calculate homegraphy matrix for each matrix
featurep1=feature(:,1:2);
featurep2=feature(:,3:4);
h = calc_homography(featurep2, featurep1);
Im=I{:,:,2};
[a,b]=size(I);
tform=projective2d(h);
J=imwarp(Im,tform); % matlab自带的处理图像变换的函数
figure,imshow(I{:,:,1});
figure,imshow(I{:,:,2});
figure,imshow(J)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
函数calc_homegraphy的代码如下:
function T = calc_homography(points1, points2)
xaxb = points2(:,1) .* points1(:,1);
xayb = points2(:,1) .* points1(:,2);
yaxb = points2(:,2) .* points1(:,1);
yayb = points2(:,2) .* points1(:,2);
A = zeros(size(points1, 1)*2, 9);
A(1:2:end,3) = 1;
A(2:2:end,6) = 1;
A(1:2:end,1:2) = points1;
A(2:2:end,4:5) = points1;
A(1:2:end,7) = -xaxb;
A(1:2:end,8) = -xayb;
A(2:2:end,7) = -yaxb;
A(2:2:end,8) = -yayb;
A(1:2:end,9) = -points2(:,1);
A(2:2:end,9) = -points2(:,2);
[~,~,V] = svd(A);
h = V(:,9) ./ V(9,9);
T= reshape(h,3,3);
end智能推荐
图像仿射变换python实现
写文章不易,如果您觉得此文对您有所帮助,请帮忙点赞、评论、收藏,感谢您! 一. 仿射变换介绍: 请参考:图解图像仿射变换:https://www.cnblogs.com/wojianxin/p/12518393.html 图像...
Docker-Compose部署nginx 和lnmp
Docker-Compose tomcat lnmp tomcat 使用Docker-Compose部署Nginx代理Tomcat集群,实现负载均衡 在这个目录下创建多个目录 切换到nginx目录修改nginx的主配置文件: [root@host1 compose]# cd nginx/ [root@host1 nginx]# vim default.conf 在末尾添加: 修改: 切换到tmca...

19-20年月度行业分析
Table of Contents 1 对各一级行业分析 2 对女装行业进行分析 对各一级行业分析 platform cid industry category themonth 销售额 访客 客群指数 行业简称 月 年 年月 0 天猫 50010368 ZIPPO/瑞士军刀/眼镜 太阳眼镜 2020-01-01 62484514.13 6663217 ...

Python数据分析入门
博客原文:https://ouduidui.cn/blog/detail?blogId=5fcddf5c61ae700fd80190db 基础知识 数据的分类 数值型数据 表示大小或多少的数据 例子:年龄、年购买量 数值型数据分析方法 最小值和最大值:查看这两个值的目的是为了能够确定一组数据的上界和下界。 **平均值:**平均值可以反映一组数据的综合水平。 **中位数:**中位数和平均数一样都是用...
猜你喜欢
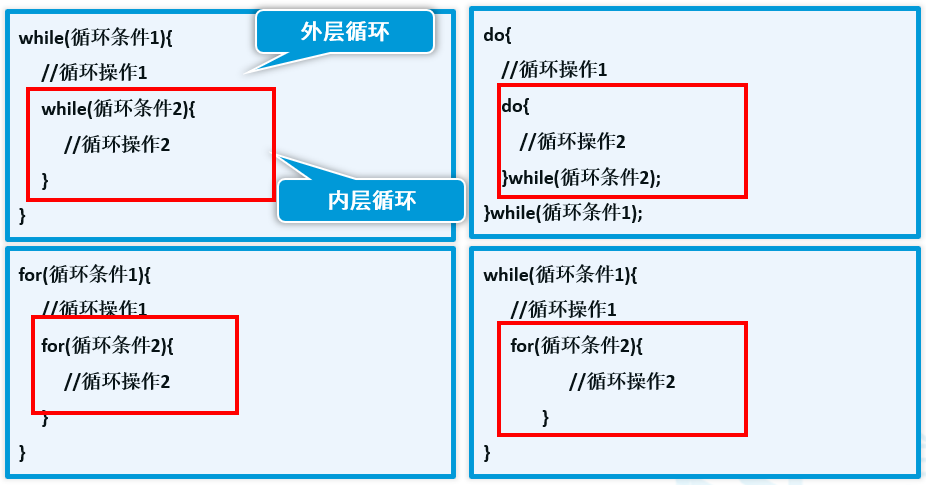
1.Java基础入门 -(10)流程控制-循环嵌套结构
什么是循环嵌套? 循环嵌套就是在循环体内,包含一个完成的循环结构。(我们在if嵌套里讲过) 示例1:使用双重循环输出九九乘法表。 运行结果: 示例2:请打印直角三角形。 (这里用 . 代替 空格 方便演示) 运行结果: 示例3:请打印等腰三角形。 运行结果: 示例4:请输出1-100之间的素数。 质数又称为素数,是一个大于1的自然数,除了1和它自身外,不能被其他自然数整除的数叫做质数;否则称为合数...

AlertDialogDemo自定义使用方法
效果图如下: Dialog左边的按钮忘记支付密码写错了 已修复 图就不改了 功能需求点击重试 再次打开输入支付密码页面 点击忘记支付密码跳转密码设置页面 此Demo只为演示AlertDialog的使用方法以及资源属性设置 需要其他功能请留言说明 这是一个支付密码输入失败的弹框 自定义了基本属性 XMl布局dialog_common 圆角框的属性commen_dialog_bg Styledialo...

2020网鼎杯---Java文件上传wp
前言 一篇文章读懂Java代码审计之XXE看过我这篇博客应该不难,没看过建议在看看。 题解 下载了所有的class发现需要上传xlsx poi 开头必须是execl 新建execl -1.xlsx文件,修改后缀名execl -1.xlsx.zip解压。 修改[Content-Types].xml 重新打包成excel-1.xlsx,文件名一定不能错。 在服务器上新建一个evil.etd文件。 然后...

关于串口数据接收出错问的问题(RS232、RS422、UART)
这两天调试串口驱动,串口驱动应该是很简单的啊,但是发现数据接收的时候,总是偶尔会出现错误,经过不断的排查,终于找到了问题的关键所在。 一段串口的verilog代码如下: 如果采样上面的方式对串口数据进行接收,就会发现串口数据总是偶尔出现个别的数据接收出错。通过ila抓波形,发现有如下图一的异常情况出现,这个时候uart_rx_i已经拉低了,但是却没有检测到下降沿,就会导致数据接收出错,这是由于亚稳...

入侵别人电脑后你必须要会的Linux与window系统用命令行下载网络资源的15种方式
我花了一天时间精心整理本文,有百度的经典方案,有老师的精心传授,也有自己的实践总结,如果觉得有用就转发收藏吧️别忘点赞哦这样可以帮助到更多的人 window系统常见下载方式 FTP脚本 vbs脚本 bitsadmin命令 $client命令 Linux系统常见下载方式 wget curl lynx fetch Axel aria2 youtube-dl 双方均可用 links links2 pyt...