强化学习之Gym基础入门(1)
目录
-
简介
训练参数的基本平台openai的Gym,与tensorflow无缝连接,仅支持python,本质是一组微分方程,简单的模型手动推导,复杂的模型需要用一些强大的物理引擎,如ODE, Bullet, Havok, Physx等,Gym在搭建机器人仿真环境用的是mujoco,ROS里面的物理引擎是gazebo。
下面是Gym中cartpole的模型,代码如下
thetaacc = (self.gravity * sintheta - costheta* temp) / (self.length * (4.0/3.0 - self.masspole * costheta * costheta / self.total_mass))
xacc = temp - self.polemass_length * thetaacc * costheta / self.total_mass它是一个开发、比较各种强化学习算法的工具库,提供了不少内置的环境,是学习强化学习不错的一个平台,gym库的一个很大的特点是可以可视化,把强化学习算法的人机交互用动画的形式呈现出来,这比仅依靠数据来分析算法有意思多了。
-
Gym安装方法(anaconda安装法)
anaconda安装
- 下载anaconda安装包
- 安装包所在目录文件夹(如下载文件夹),bash 对应的anaconda.sh文件,直接用Tab补全即可
- 安装过程会询问你是否将路径安装到环境变量中,键入yes, 至此Anaconda安装完成。你会在目录/home/你的用户名文件夹下面看到anaconda3。关掉终端,再开一个,这样环境变量才起作用。
$ cd 下载
$ bash Anaconda3-5.2.0-Linux-x86_64.sh利用anaconda建一个虚拟环境(这步感觉没用)
Anaconda创建虚拟环境的格式为:conda create –n 你要创建的名字 python=版本号。如创建的虚拟环境名字为gymlab, 用的python版本号为3.4
$ conda create -n gymlab python=3.4操作完此步之后,会在anaconda3/envs文件夹下多一个gymlab。Python3.4就在gymlab下得lib文件夹中。
安装gym
1. 开一个新的终端,然后用命令source activate gymlab**虚拟环境(感觉这个没什么用= =)
$ source activate gymlab2. 将gym克隆到计算机中. 如果你的计算机中没有安装git, 那么可以键入:sudo apt install git.先安装git.
$ git clone https://github.com/openai/gym3. cd gym 进入gym文件夹, 进行gym的完全安装
$ sudo apt-get install -y python-numpy python-dev cmake zlib1g-dev libjpeg-dev xvfb libav-tools xorg-dev python-opengl libboost-all-dev libsdl2-dev swig
$ pip install -e '.[all]'4. 在终端输入以下代码会使终端python的编译器变为anaconda,anaconda库比较多
export PATH="/home/robot/anaconda3/bin:$PATH"网上说需要加上export PYTHONPATH="/home/robot/gym:$PYTHONPATH"(感觉没用)
如果在终端报错,没有找到numpy,可以用以下命令解决,一般更新一下就行
常用命令:
conda list:列出当前已经安装的包
conda install numpy:使用conda安装numpy ,对于的卸载就是uninstall
pip install numpy:使用pip安装 ,对于的卸载就是uninstall
conda upgrade numpy:更新numpy的版本
pip install --upgrade numpy:版本更新
测试代码
import gym
import time
env = gym.make('CartPole-v0')
env.reset()
env.render()
time.sleep(2)在pycharm中输入代码,需要在代码最后加上time.sleep(2)或者env.close(),否则会报以下错误;
在终端中输入代码,则不需要上述操作,但需要关掉终端,否则无法关闭仿真界面。

pycharm中的编译器需要改为anaconda的Python版本,点小齿轮添加

注意:
-
程序代码-函数
CartPole-v0 的环境文件在gym目录/gym/envs/classic_control/cartpole.py中.
该文件定义了一个CartPoleEnv的环境类,该类的成员函数有:seed(), step(),reset()和render(). 之前调用的就是CartPoleEnv的两个成员函数reset()和render()
1. reset() 初始化函数
def reset(self):
""" 重新初始化函数 """
# 利用均匀随机分布初试化环境的状态
self.state = self.np_random.uniform(low=-0.05, high=0.05, size=(4,))
# 设置当前步数为None
self.steps_beyond_done = None
# 返回环境的初始化状态
return np.array(self.state)2. render() 图像引擎
def render(self, mode='human'):
""" render()函数在这里扮演图像引擎的角色。一个仿真环境必不可少的两部分是物理引擎和图像引擎。物理引擎模拟环境中物体的运动规律;图像引擎用来显示环境中的物体图像 """
screen_width = 600
screen_height = 400
world_width = self.x_threshold*2
scale = screen_width/world_width
carty = 100 # TOP OF CART
polewidth = 10.0
polelen = scale * 1.0
cartwidth = 50.0
cartheight = 30.0
if self.viewer is None:
# 导入rendering模块,利用rendering模块中的画图函数进行图形的绘制
from gym.envs.classic_control import rendering
# 绘制600*400的窗口函数为screen_width*screen_height
self.viewer = rendering.Viewer(screen_width, screen_height)
# 创建cart矩形,rendering.FilledPolygon为填充一个矩形
l,r,t,b = -cartwidth/2, cartwidth/2, cartheight/2, -cartheight/2
axleoffset =cartheight/4.0
cart = rendering.FilledPolygon([(l,b), (l,t), (r,t), (r,b)])
# Transform给cart添加平移属性和旋转属性
self.carttrans = rendering.Transform()
cart.add_attr(self.carttrans)
# 在图上加入几何cart
self.viewer.add_geom(cart)
# 创建摆杆pole
l,r,t,b = -polewidth/2,polewidth/2,polelen-polewidth/2,-polewidth/2
pole = rendering.FilledPolygon([(l,b), (l,t), (r,t), (r,b)])
# 给pole设置颜色
pole.set_color(.8,.6,.4)
# 添加摆杆转换矩阵属性
self.poletrans = rendering.Transform(translation=(0, axleoffset))
pole.add_attr(self.poletrans)
pole.add_attr(self.carttrans)
# 加入几何体
self.viewer.add_geom(pole)
# 创建摆杆和台车之间的连接
self.axle = rendering.make_circle(polewidth/2)
self.axle.add_attr(self.poletrans)
self.axle.add_attr(self.carttrans)
self.axle.set_color(.5,.5,.8)
self.viewer.add_geom(self.axle)
#创建台车来回滑动的轨道,即一条直线
self.track = rendering.Line((0,carty), (screen_width,carty))
self.track.set_color(0,0,0)
self.viewer.add_geom(self.track)
if self.state is None: return None
# 设置平移属性
x = self.state
cartx = x[0]*scale+screen_width/2.0 # MIDDLE OF CART
self.carttrans.set_translation(cartx, carty)
self.poletrans.set_rotation(-x[2])
return self.viewer.render(return_rgb_array = mode=='rgb_array')
3. step() 物理引擎
def step(self, action):
""" 该函数在仿真器中扮演物理引擎的角色。其输入是动作a,输出是:下一步状态,立即回报,是否终止,调试项。该函数描述了智能体与环境交互的所有信息,是环境文件中最重要的函数。在该函数中,一般利用智能体的运动学模型和动力学模型计算下一步的状态和立即回报,并判断是否达到终止状态 """
assert self.action_space.contains(action), "%r (%s) invalid"%(action, type(action))
state = self.state
# 系统的当前状态
x, x_dot, theta, theta_dot = state
# 输入动作,即作用到车上的力
force = self.force_mag if action==1 else -self.force_mag
# 余弦函数
costheta = math.cos(theta)
# 正弦函数
sintheta = math.sin(theta)
# 车摆的动力学方程式,即加速度与动作之间的关系
temp = (force + self.polemass_length * theta_dot * theta_dot * sintheta) / self.total_mass
# 摆的角加速度
thetaacc = (self.gravity * sintheta - costheta* temp) / (self.length * (4.0/3.0 - self.masspole * costheta * costheta / self.total_mass))
# 小车的平加速度
xacc = temp - self.polemass_length * thetaacc * costheta / self.total_mass
# tau是更新步长0.02,下面是计算下一步的状态
x = x + self.tau * x_dot
x_dot = x_dot + self.tau * xacc
theta = theta + self.tau * theta_dot
theta_dot = theta_dot + self.tau * thetaacc
self.state = (x,x_dot,theta,theta_dot)
# 设定小车和摆杆的阈值
done = x < -self.x_threshold \
or x > self.x_threshold \
or theta < -self.theta_threshold_radians \
or theta > self.theta_threshold_radians
done = bool(done)
#
if not done:
reward = 1.0
elif self.steps_beyond_done is None:
# Pole just fell!
self.steps_beyond_done = 0
reward = 1.0
else:
if self.steps_beyond_done == 0:
logger.warn("You are calling 'step()' even though this environment has already returned done = True. You should always call 'reset()' once you receive 'done = True' -- any further steps are undefined behavior.")
self.steps_beyond_done += 1
reward = 0.0
return np.array(self.state), reward, done, {}-
参考文献和资料
智能推荐
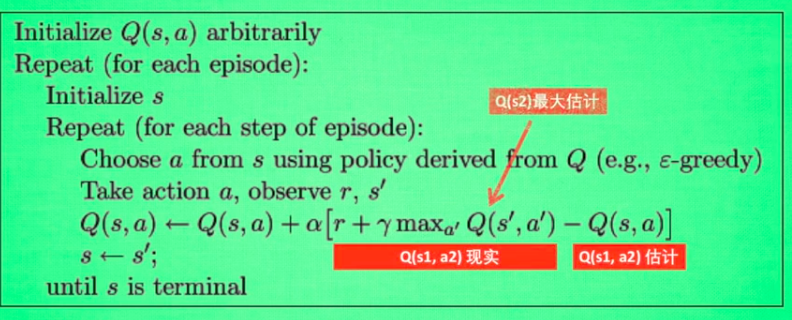
强化学习入门
概念 强化学习简单来说像训练大猩猩,我们告诉它哪个行为有奖励,他在多次做出行为的时候就会知道反馈,哪个好,哪个不好,于是久而久之就会选择好的行为。 标准的定义是:如果Agent的某个行为策略导致环境正的奖赏(强化信号),那么Agent以后产生这个行为策略的趋势便会加强。Agent的目标是在每个离散状态发现最优策略以使期望的折扣奖赏和最大。 重要的是 agent,Action,environment...
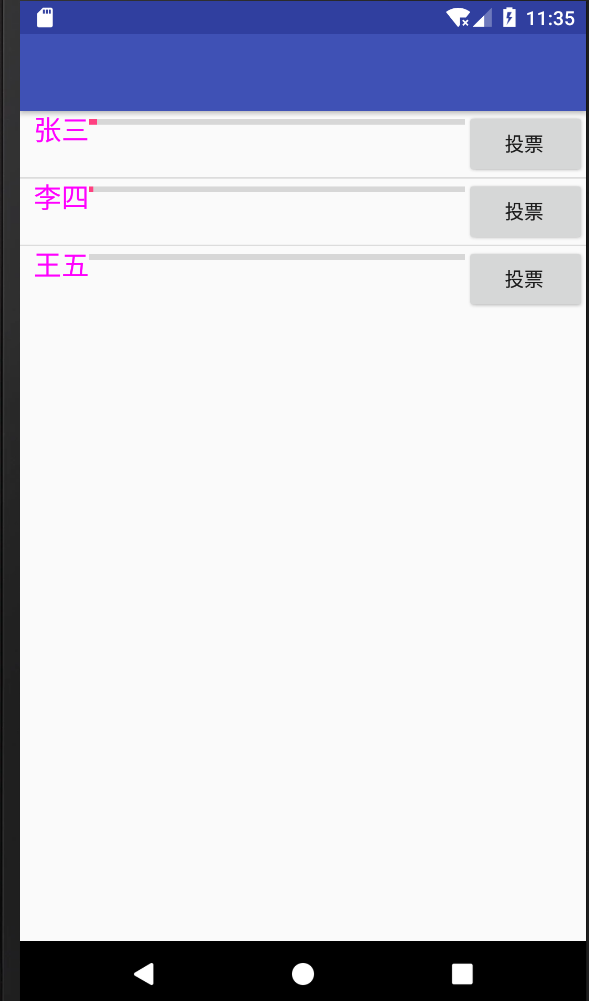
安卓:通过BaseAdapter适配器对ListView组件的简单应用案例
项目结果演示: 案例实现流程: 在布局文件中新建一个ListView组件 ↓ 在另一个布局文件中新建一个用于展示的布局文件 ↓ 在java文件中新建实体类Student ↓ 在java文件中新建StudentApdater继承BaseAdapter并覆写相关方法(重点:覆写getView方法) ↓ 通过LinkedList插入数据 ↓ 调用自己定义...
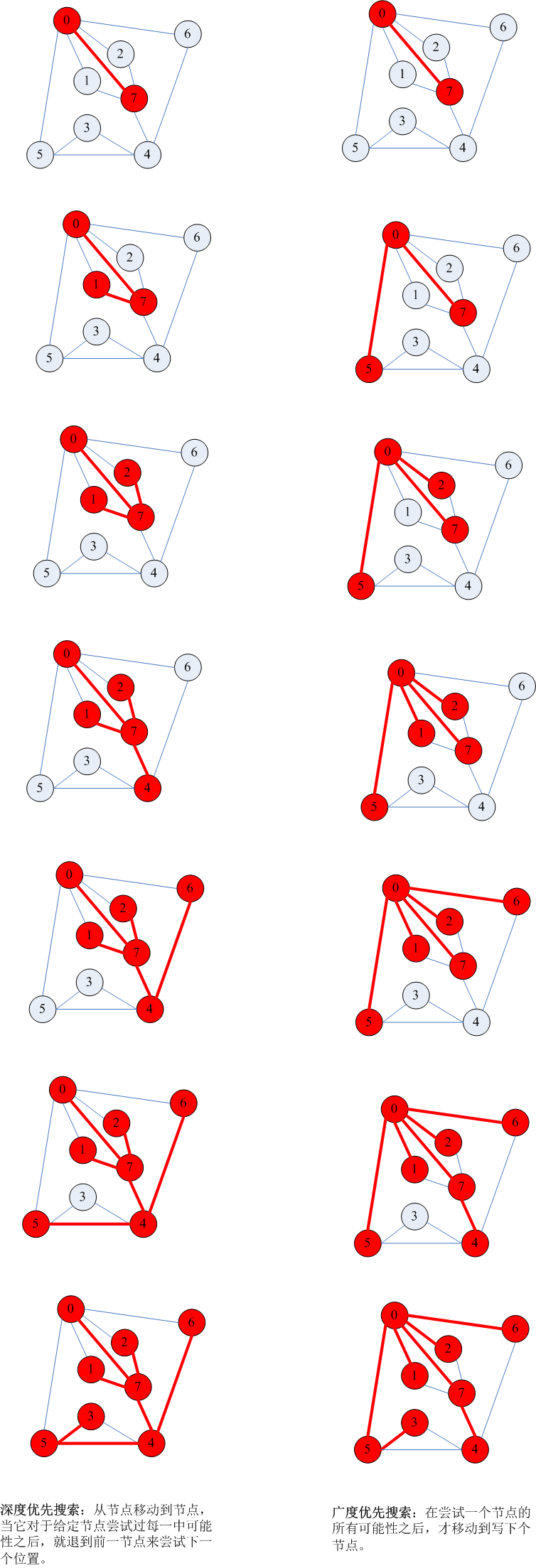
递归与树(三)
图的遍历: 深度优先搜索 从任意节点开始, 访问v。 (递归的)访问每一个依附于v的(未访问过的)节点。 如果图是连通的,我们最终可以到达所有的节点。 深度优先搜索递归实现: 要访问图中与节点k相连的所有节点,我们将它标记为访问过的,然后递归的访问k的邻接表中所有未访问过的节点。 void traverse(link k,void (*visit)(int)) { li...
博客运用Hexo-Next主题美化(上)
–此篇文章有转载,转载url放在最后方 1、前言 上篇文章已经在Windows上将个人博客个搭建好了(如果还不知道怎么搭建的,可以戳这里,可是大家有没有发现,搭建的Hexo博客使用的是默认主题,而且不咋好看,跟那些大神们的个人博客相比,还差了很多,不过不要紧,看完这篇文章,你也可以拥有那些炫酷吊炸天的效果。废话少说,那就直接开始吧。 2、设置主题 Hexo给我们提供了很多的主题供我...
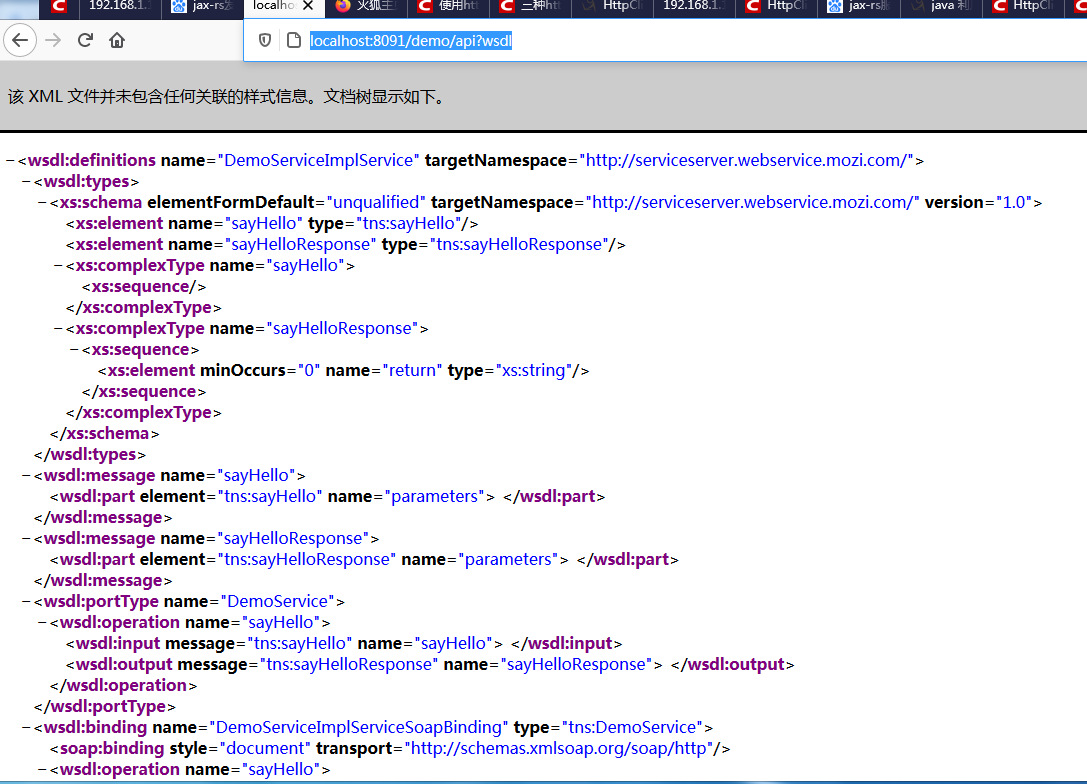
spring-boot整合jax-ws发布服务
第一步:导入依赖 第二步:创建接口 第三步:创建实现类 第四部:创建配置类 第五部:启动项目,访问http://localhost:8091/demo/api?wsdl 显示效果如下,则发布成功...
猜你喜欢
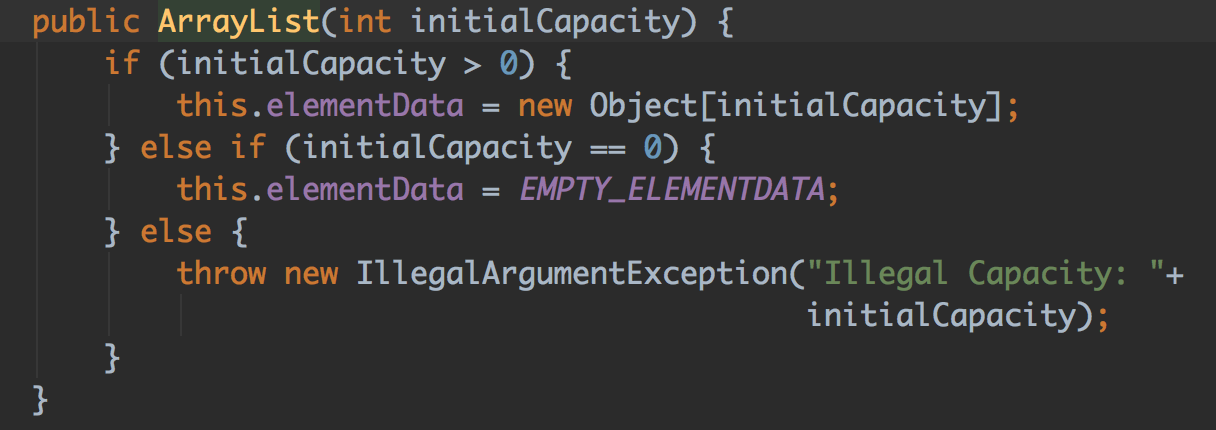
ArrayList中的迷惑行为
当我准备利用ArrayList的add(index,element)方法时遇到一个郁闷的结果。 废话不多说,show time 我现在需要满足一个需求,就是希望利用arrayList可以将本来的无序的元素添加到对应的index下 执行后: java.lang.IndexOutOfBoundsException: Index: 3, Size: 0 ArrayList初始化源码 因为初始化的 arr...
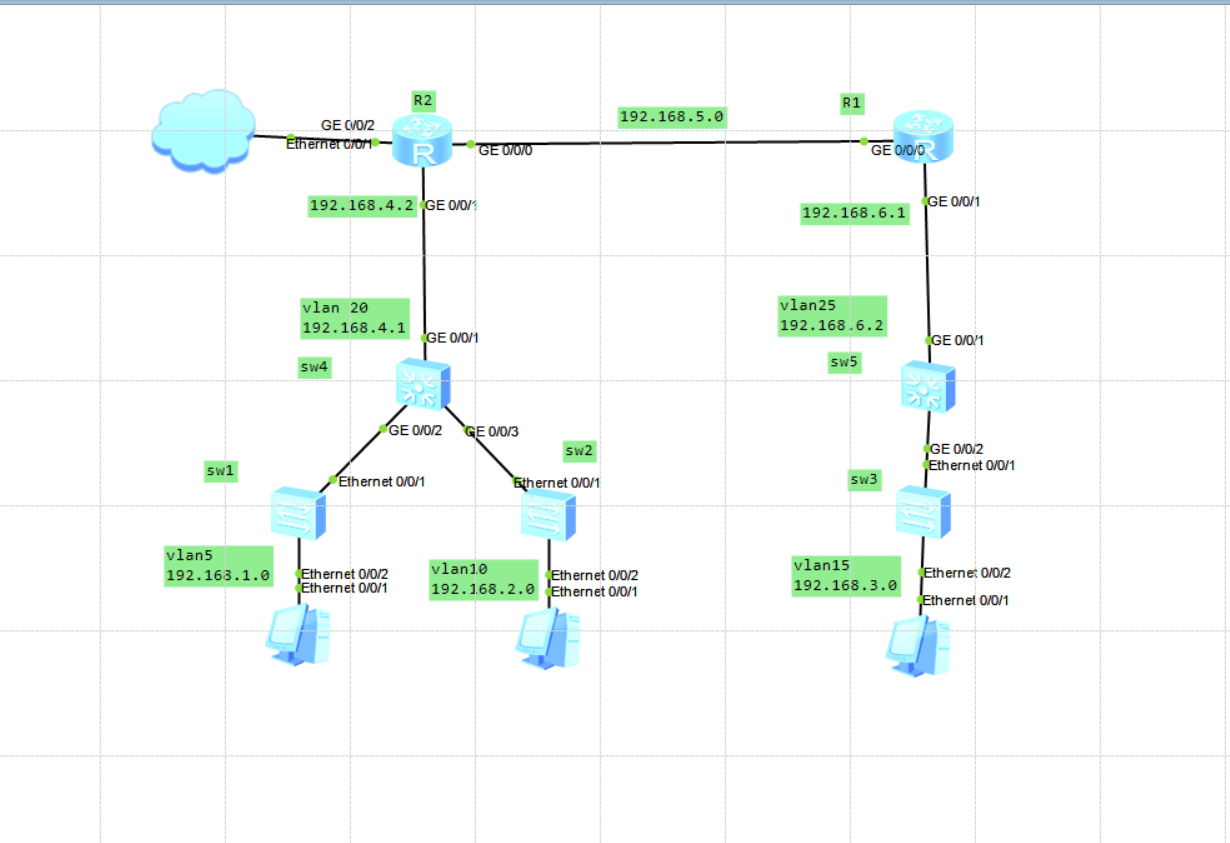
1+x云计算中级,第二天串讲,拓扑图
1+x云计算中级,串讲第二天的内容为利用ensp模拟华为设备 拓扑图如下 需要达到的效果:网络互通,各个vlan之间能正常通信,三个PC机能通过dhcp获得地址,能够通过cloud连接到外网,ping通8.8.8.8 需要用的技术有,vlan划分,OSPF,静态路由,路由的重发布,nat,基于端口的dhcp技术,cloud的使用 配置步骤 cloud的设置,连接物理机的网卡,请选择vm netwo...
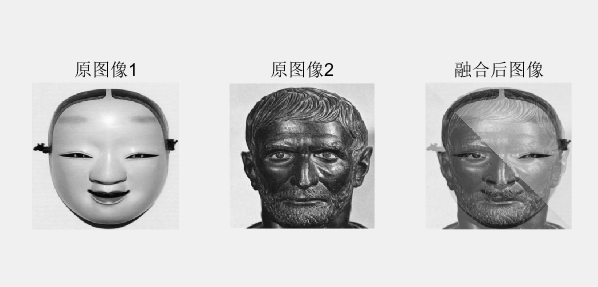
小波变换图像融合
最近在做一个小实验,基于小波变换对图像进行融合的MATLAB实验。 ***小波变换图像融合原理:***对一幅灰度图像进行N层的小波分解,形成3N+1个不同频带的数据,其中有3N个包含细节信息的高频带和一个包含近似分量的低频带。分解层数越多,越高层的数据尺寸越小,形成塔状结构,用小波对图像进行多尺度分解的过程,可以看作是对图像的多尺度边缘提取过程。小波变换具有空间和频域局部性,它可将图像分解到一系列...

幸运大转盘
界面参考:点击打开链接 index.html common.css: index.css: index.js: 效果图: 缺陷: (1)没有做移动端的自适应; (2)代码没有封装; (3)每次转时,不能从上次的位置开始,每次都从第一个开始; (4)这个是转盘在转,没有做指针转的版本。 注:只用js实现了,还没用jq实现。 后面又做了bug修复和优化,链接:点击打开链接...